An immediate consequence of mass action is that the right hand sides of the ODEs are polynomials in the dynamical variables. A polynomial of degree 2 (a quadric) in 2 variables looks like
a1x12 + a2x1x2 + a3x22 + a4x1 + a5x2 + a6
Polynomial dynamical systems can exhibit complex dynamics, as in the chaotic Lorenz attractor. Even for systems in just two variables, Hilbert's Sixteenth Problem remains unsolved. However, our polynomial dynamics arise from an underlying network of chemical reactions, which seems to give simpler dynamic behaviour (a folk belief, not a theorem). More to the point, our interest will be, initially, in steady states, where dx/dt = 0.
Is it reasonable to consider steady states? There are experimental situations in which it is believed that sub-networks reach "quasi-steady state". That is, they change so rapidly compared to the rest of the network, that it is a reasonable approximation to assume that they are in steady state, although the rest of the network might not be. It is also possible to engineer in-vitro systems to reach quasi-steady states. Finally, knowing the steady states is often the first step to understanding the dynamics.
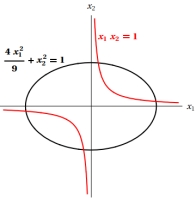
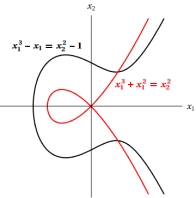
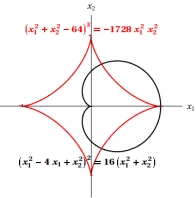
With mass action, the steady states are solutions to a system of polynomial equations. Just as linear algebra studies solutions of linear equations, algebraic geometry studies solutions of polynomial equations. The set of all solutions to a system of polynomial equations forms an algebraic variety. Some algebraic varieties in the plane are very familiar. For different values of the a's, the solutions of the quadric above correspond to the conic sections of Euclidean geometry: circles, ellipses, hyperbolas, etc. However, as the degree increases, the geometry becomes more subtle.
Unlike differentiable manifolds, algebraic varieties may have singularities, like self-intersections or cusps, which can have a marked influence on their global properties. Furthermore, because varieties are algebraic, they can be defined over an arbitrary base field. In contrast, differentiable manifolds require infinitesimals, which only make sense over fields like R.
The late Karin Gatermann was the first to apply geometric ideas to steady state varieties [♦]. Gheorghe Craciun et al have built upon this [♦] to show that the Deficiency Zero theorem of Chemical Reaction Network Theory [♦], as developed by Martin Feinberg, can be reinterpreted in terms of toric varieties. From a different perspective, we have shown that networks arising in cellular signalling have interesting steady-state geometries [♦], as discussed in part 4 of these notes.
previous next back to research
 |
 |
 |